These are raw (inexhaustive) notes on position and angle sensing. I’m researching ways to measure joint angles in small (<25mm in all dimensions) cable driven joints (both 1 and 2 dof), so this will dismiss or ignore many “normal” solutions.
Hall Effect And Magnetoresistive Sensors
There are a bunch of these. In my joint setup, I’m trying to do sensors internal to the joint. This means I won’t have access to the end of the rotating shaft. This would be the easiest for magnet based sensors, although many of them now claim to allow “off axis” measurement.
There’s also a lot of these that are 3D position sensors, that also have a mode that will output angle measurement in a single plane.
There are a bunch of interface options - i2c, spi, pwm, analog voltage, more. This won’t be a limiter.
Questions I Need To Answer
- How far away can the off axis magnet be in mm?
- In the off axis cases, what magnet <-> chip orientation is allowed? Some mention perpendicular, some mention parallel.
- In the “absolute best case” (aka: perfect magnet, assume best performance of sensors, etc) what angle resolution do I get? What angle stability?
Representative Examples
- AS5601 from AMS OSRAM
- This does not allow off axis, but measures the “orthogonal component of the flux density from an external magnet”. This seems like it means that a sensor parallel to a shaft with a transverse magnetic field would be able to measure the shaft angle, but the terminology is not 100% clear to me.
- Unfortunately their evaluation accessory looks like it shows the axial case. The document there says it uses a diametric magnet, so this is definitely the axial case with an “across the diameter” magnet.
- TMAG5170-Q1 from Texas Instruments.
- This is a “linear 3D Hall-effect sensor”, but it has a build in “angle calculation engine … for both on-axis and off-axis angle measurement”.
- This design doc has some good info. It mentions single axis versions of this chip (DRV5055), and then the TMAG5170-Q1 as the “tile and angle” sensor. The spherical magnet thumb toggle joystick is a nice idea, too.
- I don’t see any mention of mm in that document.
- But it links to this design document which seems really great. It has specific distance examples.
- “N30” magnet at 4.5mm has 50mT of magnetic flux.
- Pg 6 shows an example of the TMAG5170 next to a diametrically magnetized magnet. I think this could work if I can replace the diametric magnet with either a bar magnet through a shaft, or a ring magnet around a shaft.
- Oddly, this is what they refer to as “On-Axis” placement.
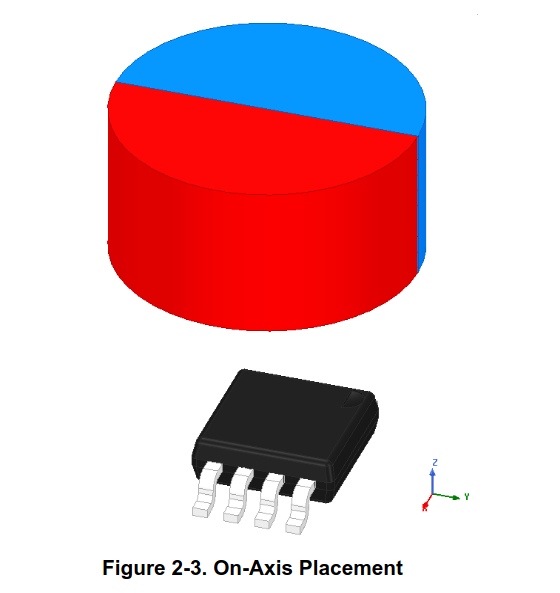 . Not what I was thinking!
. Not what I was thinking! - This note might cause problems with the bar magnet approach because the magnetic field will not be consistent?

- But then the follow up makes it sound like this might be a different problem (scaling an axis when you can’t have the sensor pointed radially in to the center of the magnet)
- Oddly, this is what they refer to as “On-Axis” placement.